技術有限公司")
國家高新技術企業(yè)微型減速電機源頭廠家
全國熱線電話 13360643171
<strike id="6ugwa"></strike>
<strike id="6ugwa"></strike>
<del id="6ugwa"></del> 資訊")
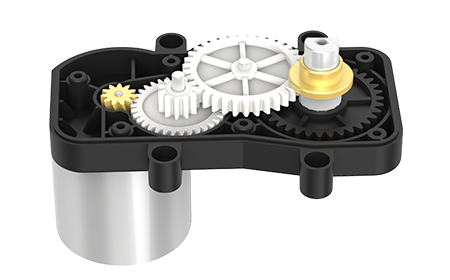
隨著中國經(jīng)濟的發(fā)展,人口紅利已經(jīng)消失,人工工資成本越來越高,再加上人們生活水平的提高,人對機器的依賴性越來越大,作為新興的清潔家電的智能掃地機器人已經(jīng)走進了很多家庭。智能掃地機器人的核心部分有:雷達,這是智能掃地機器人的眼睛;控制芯片,這是智能掃地機器人的心臟和大腦;還有就是由齒輪減速箱組成的輪子,邊刷,主刷,這是智能掃地機器人的手和腳。科華精密的研發(fā)人員在這里和大家分享一下齒輪減速箱的設計問題:
1. 齒輪減速箱上下殼,通常是用螺絲鎖緊,這個傳統(tǒng)裝配工藝,確保了齒輪箱的牢固性好,不會因為抖動,震動或者摔落而導致輪子的散落。但是這個工藝,打螺絲是比較花時間的,所以,新型的設計,在上下蓋之間追加了扣位,減少螺絲鎖緊工藝時間。算是盡量節(jié)省裝配工藝時間成本,把成本降到最低。
2. 對于智能掃地機器人來說,噪音是最重要的參數(shù)之一,也是最難解決的問題之一。齒輪減速箱的噪音主要是來自于第一級齒輪傳動,因為,馬達的轉速很高,一般都是在5000-7000轉/分之間,早期的齒輪減速箱第一級傳動一般用POM材料制作的斜齒輪,后期,隨著開發(fā)工程師的經(jīng)驗越來越豐富,比如,科華精密的研發(fā)工程師開發(fā)的智能掃地機器人齒輪箱,第一級齒輪傳動采用的是斜齒輪傳動,且斜齒輪采用了具有降噪功能的TPEE的材料。斜齒輪傳動,齒輪嚙合度高,噪音低,傳輸扭矩大。

3. 根據(jù)空間大小,整個齒輪箱的設計成4級減速,有些設計師,為了加大扭矩,每級齒輪的模數(shù)還不同,第一級模數(shù)一般取0.5,第二級和第三級一般取0.6,第四級一般取0.8
4. 最后一級是輸出部分,輸出軸會用軸承定位,有些工程師還設置了2個軸承,軸承不便宜,確實會提高很多成本
有關掃地機器人齒輪減速箱設計方面的知識很多很多,科華精密的小編會不斷分享給大家,歡迎大家關注科華精密
手機:13360643171
Q Q:502376265
郵箱:forwa@163.com
系人") 掃一掃,有驚喜
掃一掃,有驚喜





技術有限公司")
